Cánh tay robot thủy lực là gì?
Cánh tay robot thủy lực là một thiết bị tự động được thiết kế để thực hiện các tác vụ cơ khí trong các môi trường sản xuất, đặc biệt là trong các công việc yêu cầu độ chính xác và lực tác động lớn. Cánh tay robot này sử dụng hệ thống thủy lực để di chuyển và điều khiển các khớp và bộ phận của tay máy, giúp thực hiện các công việc như lắp ráp, nâng hạ, hàn, hoặc khoan trong các ngành công nghiệp.

Vai trò và tầm quan trọng trong công nghiệp hiện đại
Cánh tay robot thủy lực đóng vai trò quan trọng trong tự động hóa sản xuất, giúp nâng cao năng suất, chất lượng sản phẩm và giảm chi phí lao động. Chúng có thể thực hiện các công việc chính xác, nhanh chóng và liên tục mà không cần nghỉ ngơi, góp phần vào việc nâng cao hiệu quả sản xuất trong các ngành công nghiệp như ô tô, điện tử, thực phẩm, và y tế. Việc áp dụng robot thủy lực giúp giảm thiểu sự can thiệp của con người vào các công việc nguy hiểm, bảo vệ sức khỏe và an toàn cho người lao động.
Cấu tạo của cánh tay robot thủy lực
Tay máy (Phần cứng)
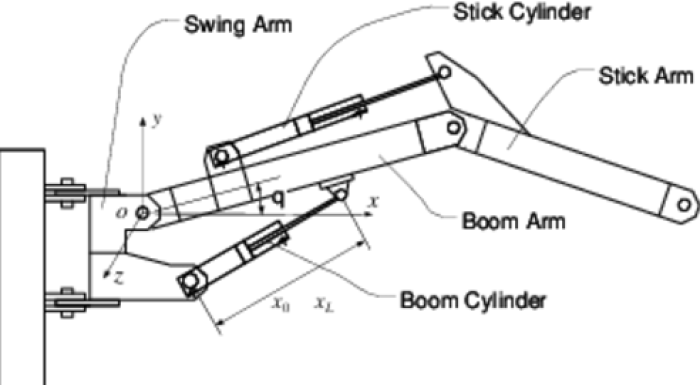
- Mô phỏng cánh tay người với các khớp và khâu để di chuyển và xoay: Cánh tay robot thủy lực có cấu tạo giống cánh tay con người với các khớp xoay, giúp chúng có thể thực hiện các chuyển động linh hoạt như nâng, xoay, gắp, và di chuyển vật. Các khớp này có thể di chuyển theo nhiều hướng khác nhau, giúp robot thực hiện nhiều tác vụ khác nhau.
- Chất liệu chế tạo - các bộ phận quan trọng của cánh tay robot thủy lực thường được làm từ vật liệu như gang và thép, nhờ vào khả năng chịu lực, độ bền cao và chống mài mòn tốt. Chất liệu này đảm bảo rằng cánh tay robot có thể hoạt động liên tục trong môi trường sản xuất mà không gặp phải sự hư hỏng do tác động mạnh hay môi trường khắc nghiệt.
Hệ thống điều khiển
Bộ phận xử lý tín hiệu và điều khiển hoạt động của cánh tay robot: Hệ thống điều khiển là bộ phận xử lý các tín hiệu từ cảm biến, máy tính và các thiết bị ngoại vi khác. Bộ phận này quyết định hướng đi và các hành động của cánh tay robot thông qua các lệnh lập trình, cho phép robot thực hiện các nhiệm vụ chính xác và đồng bộ.
Hệ thống thủy lực
Xi lanh thủy lực và bơm thủy lực
Hệ thống thủy lực là trái tim của cánh tay robot, nơi tạo ra năng lượng cần thiết để thực hiện các chuyển động. Cánh tay robot thủy lực sử dụng bơm thủy lực để bơm chất lỏng (thường là dầu hoặc nước) vào các xi lanh thủy lực. Các xi lanh này chuyển đổi năng lượng thủy lực thành năng lượng cơ học để di chuyển các bộ phận robot. Mỗi bộ phận di chuyển của cánh tay robot, như xoay khớp, nâng hạ hoặc thay đổi góc độ, được điều khiển bằng áp suất và lưu lượng của chất lỏng thủy lực. Các van thủy lực điều chỉnh lưu lượng chất lỏng và kiểm soát lực tác động, từ đó quyết định tốc độ và lực tác động của các bộ phận.
Hệ thống van và ống dẫn
Các van thủy lực giúp điều chỉnh tốc độ và lực của cánh tay robot. Chúng cho phép chất lỏng thủy lực chảy qua các kênh và xi lanh theo hướng mong muốn, đồng thời thay đổi các điều kiện áp suất để kiểm soát tốc độ của các chuyển động. Hệ thống ống dẫn chất lỏng nối các bộ phận trong hệ thống thủy lực, đảm bảo chất lỏng có thể di chuyển đến đúng vị trí cần thiết trong cánh tay robot.
Hệ thống quản lý và vận hành
Phần mềm điều khiển
Cánh tay robot thủy lực được lập trình và vận hành thông qua phần mềm điều khiển trên máy tính. Phần mềm này giúp kỹ thuật viên thiết lập các chương trình điều khiển cho robot, định nghĩa các nhiệm vụ mà robot cần thực hiện. Các lệnh lập trình này có thể bao gồm các thao tác như nâng hạ, xoay, gắp hoặc di chuyển vật thể từ vị trí này sang vị trí khác. Phần mềm điều khiển cũng có khả năng giám sát và điều chỉnh các yếu tố như lực và tốc độ của robot, đảm bảo rằng các chuyển động luôn đạt độ chính xác cao.
Cảm biến và giao tiếp
Các cảm biến được gắn trên các bộ phận của cánh tay robot giúp theo dõi chuyển động và vị trí của robot trong không gian. Cảm biến lực có thể đo được các lực tác động trong quá trình hoạt động của cánh tay robot, giúp điều chỉnh hoạt động của robot sao cho phù hợp với yêu cầu. Hệ thống giao tiếp giữa các bộ phận giúp thông tin được truyền tải nhanh chóng và chính xác, từ đó đảm bảo cánh tay robot hoạt động đồng bộ và hiệu quả.
Nguyên lý hoạt động của cánh tay robot thủy lực
Nguyên lý hoạt động của cánh tay robot thủy lực dựa trên việc sử dụng năng lượng thủy lực để tạo ra lực và chuyển động. Bằng cách điều khiển các van, xi lanh và bơm thủy lực, robot có thể thực hiện các tác vụ cơ khí với độ chính xác cao và lực tác động mạnh mẽ. Hệ thống điều khiển và lập trình giúp robot có thể thực hiện một loạt các nhiệm vụ tự động hóa trong sản xuất, từ lắp ráp, hàn cho đến gắp và di chuyển vật thể.

Hệ thống thủy lực
Bơm chất lỏng thủy lực khắp hệ thống để tạo ra năng lượng cần thiết - cánh tay robot thủy lực sử dụng bơm thủy lực để đẩy chất lỏng (thường là dầu hoặc nước) qua các ống dẫn đến các bộ phận khác nhau của robot. Chất lỏng này giúp tạo ra lực tác động cần thiết để di chuyển các bộ phận của robot.
Chất lỏng được điều chỉnh qua các van để kiểm soát tốc độ và áp suất - các van thủy lực kiểm soát lưu lượng và áp suất của chất lỏng, từ đó điều chỉnh tốc độ và lực mà cánh tay robot có thể tác động vào các đối tượng. Điều này cho phép robot thực hiện các chuyển động mượt mà và chính xác.
Xi lanh thủy lực
Chuyển đổi năng lượng thủy lực trở lại thành năng lượng cơ học, giúp vận hành các bộ phận khác nhau của cánh tay robot: Xi lanh thủy lực nhận năng lượng từ chất lỏng và chuyển hóa nó thành chuyển động cơ học. Chúng đóng vai trò quan trọng trong việc di chuyển các bộ phận của cánh tay robot, như nâng, hạ hoặc xoay các vật thể.
Điều khiển và lập trình
Hệ thống điều khiển nhận và xử lý tín hiệu, sau đó phát thông tin để động cơ dịch chuyển theo yêu cầu: Các tín hiệu được truyền đến hệ thống điều khiển từ các cảm biến và thiết bị đo, sau đó hệ thống điều khiển xử lý và phát lệnh điều khiển động cơ và các khớp của cánh tay robot. Điều này đảm bảo rằng cánh tay robot thực hiện chính xác các tác vụ như nâng vật, hàn, hoặc lắp ráp.
Ứng dụng của cánh tay robot thủy lực trong sản xuất
Tự động hóa trong sản xuất
Cánh tay robot thủy lực giúp giảm thiểu thời gian sản xuất và tăng năng suất lao động. Việc tự động hóa các quy trình lặp lại giúp giảm sai sót, nâng cao độ chính xác và đồng nhất của sản phẩm. Đồng thời, chúng giúp giảm thiểu sự can thiệp của con người trong quá trình sản xuất, từ đó giảm thiểu lỗi do con người gây ra và đảm bảo các sản phẩm đạt được độ chính xác cao hơn.
Các lĩnh vực ứng dụng cụ thể
- Sản xuất ô tô - lắp ráp các bộ phận, hàn và sơn các chi tiết ô tô
- Sản xuất điện tử - hàn, lắp ráp và kiểm tra các linh kiện điện tử
- Dược phẩm - đóng gói, pha chế và phân phối các sản phẩm dược phẩm
- Thực phẩm và đồ uống - chế biến, đóng gói và phân phối các sản phẩm thực phẩm
- Phẫu thuật y tế - hỗ trợ phẫu thuật chính xác và xâm lấn tối thiểu

Lợi ích của việc sử dụng cánh tay robot thủy lực
- Độ chính xác và tốc độ cao - cánh tay robot thủy lực có thể thực hiện các nhiệm vụ với độ chính xác tuyệt đối và tốc độ vượt trội, đảm bảo hiệu quả trong sản xuất
- Tiết kiệm không gian - với thiết kế nhỏ gọn, cánh tay robot thủy lực tiết kiệm không gian trong nhà máy, giúp tối ưu hóa không gian sản xuất
- Tính linh hoạt - cánh tay robot có thể được tùy chỉnh với các công cụ chuyên dụng để thực hiện nhiều nhiệm vụ khác nhau, từ lắp ráp đến kiểm tra và vận chuyển
- An toàn - robot thủy lực giúp loại bỏ yếu tố con người khỏi quá trình sản xuất nguy hiểm, từ đó bảo vệ sức khỏe và an toàn cho người lao động
- Nâng cao năng suất - cánh tay robot có thể hoạt động liên tục trong thời gian dài mà không bị mệt mỏi, từ đó giúp nâng cao năng suất sản xuất mà không cần nghỉ ngơi
